
Speaker impulse response explained – the basics
What is an impulse response (IR)?
The speaker impulse response is something a little bit more complicated than it looks on the surface. You definitely have seen this term, if you used some computer software to measure frequency response. However, the speaker impulse response doesn’t give direct information. But rather it holds many useful data, that you can extract from it, using complicated mathematical functions. If you go deeper on how the math behind it works, you will soon regret it. The calculations are very complicated, with imaginary numbers, and it’s best to leave it in the computer’s hands. Nevertheless, the purpose of this article is to decipher the impulse response, in a logical way, rather than a mathematical one.
Speaker impulse response in ARTA
If you want to measure the frequency response of a speaker, you first have to make an impulse response measurement. If you are not familiar with this process, check out how to measure frequency response using ARTA. After you setup your speaker and measuring microphone (Amazon affiliate paid link) correctly, the reading should look like this :

This is an example of impulse response, and you can extract useful information just by looking at it. On the X-axis you got time, and on the Y-axis you got amplitude. Here is what you can tell just by looking at the graph :
- You got a whole lot of nothing till the signal reaches the microphone.
- Large spike as the signal makes first contact with the microphone.
- The amplitudes fades away as the signal decays.
- After same time, smaller spikes indicate room reflections arriving the microphone.
Using this graph you can deduct the reflection free window (between the big spike and the secondary smaller spike from the room reflection). Between this time span, the response is truly anechoic. However, this is the information we see at the surface. This “spike on a flat line” holds a lot more information. More on that, later.
Basic procedure on frequency response measurement
Let’s say that you want to measure the frequency response of a speaker and you don’t have an anechoic chamber. As a result, you have to measure it in a reverberant room, which will reflect, transmit and absorb sound waves. This will contaminate the frequency response to some degree. In conclusion, you have to consider only the direct waves from the speaker and filter the room interference.
The solution to this problem is to stop recording after the first wave hits the microphone. Change the frequency, and repeat until you have sufficient information to plot a graph. How tedious. A practical way to measure every single frequency is to use as an input signal, a linearly swept sine. The sine starts at 0 Hz frequency, and begins sweeping linearly towards higher frequencies.
How to design loudspeakers - video courses


However, sound travels roughly by 1 meter every 3 ms. Since the oscillator is set to sweep the audible frequency range (1 Hz – 20 kHz) in 2 seconds, it would pass a 10 Hz range of frequencies every millisecond. Each reflected 10 Hz range, which takes longer to arrive, would be rejected by the analyzer which changes its receiving frequency every millisecond. Now let’s get back to 21st century and see how it’s done.
What is so special about this impulse?
To minimize the effort of measuring frequency response, a special type of signal has been devised. Let’s imagine we had a signal that had a constant, flat spectrum at all frequencies. If you fed this signal into a loudspeaker, and perform a high-resolution frequency analysis of the acoustic output, that will be the frequency response of the speaker. This signal is now called the impulse response.
An ideal impulse is one with infinite amplitude and zero width in time, also called the unit impulse. As we saw in the ARTA graph, the speaker impulse response resides in the time domain. On the X-axis we have time and on the Y-axis we have amplitude. Imagine a rectangle defined by a certain width on the time axis and a certain length on the amplitude axis, with a fixed area of 1 (unit impulse). As a result, when we narrow down the time width towards zero, the amplitude will continuously rise, to maintain the area of 1. In reality the time width is very small, but not zero.
Squeezing the time width down has specific advantages. It creates a small enough capture window for the microphone, so it can cut off before room reflections. Furthermore, because the amplitude is large, it allows a wide frequency spectrum to pass.
Characteristics and types of impulse responses
The speaker impulse response has several characteristics:
- High amplitude.
- Width in time as close to zero as possible.
- Holds frequency response information.
- Holds phase response information.
Isn’t the impulse response in the time domain? How can it tell us anything about the frequency response or phase? This is the math part I told you about, that will make you scratch your head until you make a red spot. For linear systems there is direct relationship between time domain data and frequency domain data. For a loudspeaker, the equivalent of its frequency response in the frequency domain is the impulse response in the time domain.
To transform the time domain information from the impulse response into frequency response the Fourier transform is used, which is a very complex mathematical procedure. Surely you have seen the acronym FFT, which stands for Fast Fourier Transform. Similarly, to extract the phase response from the impulse response, you can use another mathematical operation called the Hilbert Transform.
There are a few types of speaker impulse responses. We can check ARTA for that :
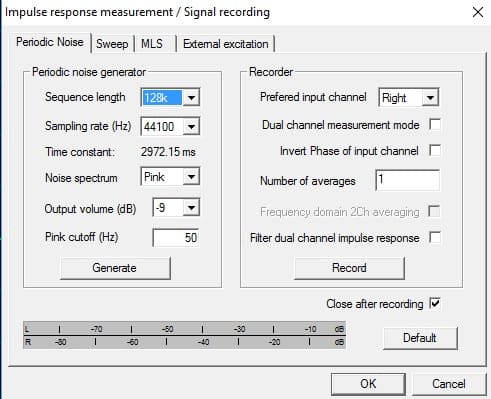
As a signal for the speaker impulse response we can use :
- Periodic noise (which can be white or pink noise).
- Sweep (logarithmic of linear).
- MLS
The MLS (maximum length sequence) is an interesting signal. It uses a series of pulses of random pink or white noises. The best part is that it has a high signal to noise ratio. In conclusion, it’s especially useful in environments with high ambient noise (typical room).
Conclusion
An impulse response is something we use today, in the digital era, to make accurate and convenient frequency response and phase measurements. Besides frequency and phase, you can also extract step response, cumulative spectral decay, energy time curve, burst decay, etc. It packs a lot of data in a small amount of time, which can be decoded, thanks to the fast computers we have today, into the information we are interested in. However, even with these sophisticated techniques, measuring very low frequencies will remain a challenge in small rooms.
References
- Testing Loudspeakers by Joseph D’Appolito (Audio Amateur Pubns,1998)
- Speaker Building 201: A Comprehensive Course in Speaker Design by Ray Alden (Audio Amateur Pubns, 2004).
- Image source : AI generated
You May also Like

Learn loudspeaker design from scratch

2 comments
Nice article. Unfortunately, few people can understand it.
For avoiding confusion, each time you write “impulse response”, please explicitly tell if you mean :
– impulse response direct recording (recording the time-domain output when applying a Dirac stimulus, possibly using averaging)
– impulse response direct computation (computing the inverse FFT of a dual-channel output / input FFT transfer function measurement when applying a Pink Noise, a White Noise, or a MLS stimulus)
– impulse response computing using the minimum-phase hypothesis (the exact phase hence exact impulse response of a minimum-phase system can be computed using its frequency response)
– impulse response considered as mathematical object
For better installing the context, please tell that :
– speaker drivers operate as minimum-phase systems
– most multiway crossovers operate as NON minimum-phase systems
– consequently most multiway speakers operate as NON minimum-phase systems
Speaking of a MLS stimulus, ask yourself if :
– the impulse response computation requires a dual-channel data acquisition system (output and stimulus),
– the impulse response computation only requires a single-channel data acquisition system (output) because of the MLS stimulus exhibiting statistical properties known by advance,
– the impulse response computation relies on the minimum-phase hypothesis
Speaking of a frequency sweep stimulus, ask yourself if :
– the impulse response computation requires a dual-channel data acquisition system (output and stimulus),
– the impulse response computation only requires a single-channel data acquisition system (output) because of the frequency sweep stimulus featuring a frequency increase rate known by advance or some other trick,
– the impulse response computation relies on the minimum-phase hypothesis
– the impulse response computation relies on the Angelo Farina trick published at the AES 108th Convention 2000 February 19-22 – Paris, France
Most speaker measurement software menus miserably fail in telling all this. Consequently, most DIY users can’t understand what they actually do. For avoiding ambiguity and for achieving a decent signal/noise ratio, I’m relying on the impulse response direct computation, aka computing the inverse FFT of a dual-channel output / input FFT transfer function measurement when applying a Pink Noise stimulus, the mike distance being set to 50 cm in case the room is an ordinary living room featuring important room reflections. I designed my own dual-channel FFT analyzer, and inverse-FFT plotter and Pink Noise generator using Flowstone, compiling a .exe running on a Windows 7 PC. Speaking of hardware, all you require is a decent 2 channel-in, 2-channel-out USB soundcard featuring four Cinch or RCA sockets like a Behringer UCA22, and a analog loopback cable allowing the dual-channel FFT analyzer to see in realtime what analog stimulus goes to the analyzed system. Once you DIY all this, everything becomes clear. Do you know Flowstone?
Haven’t heard of Flowstone. I guess it’s something to help you in making your own measurement app. Like you said, once you DIY all that, everything becomes clear. I’m sure it does. I’m still having difficulty in understanding the whole, big picture without any effort. Hope that with practice it will all become natural.