
Passive crossover schematic – most types
How to build a passive crossover ?
Follow a passive crossover schematic, and build a basic electrical circuit. It’s that easy. Before we get into that, you first have to know what are your needs, and which type of crossover is more suited for your application. If you haven’t already, please read this article to get a basic idea on how crossover networks work. Next, let’s recap the categories of the crossovers :
You got the order of the crossover which dictates the slope :
- 1st order – 6 dB / octave slope.
- 2nd order – 12 dB / octave slope.
- 3rd order – 18 dB / octave slope.
- 4th order – 24 dB / octave slope.
- etc.
And then you got the type :
- Linkwitz-Riley crossover – which matches the attenuation slopes, so they combine for a flat response at the crossover point.
- Butterworth crossover – which creates a small peak in response at the crossover point.
- Bessel crossover – is somewhere between the first two.
Depending on how much protection you need for your drivers, you will pick your crossover order to determine the steepness of the attenuation slope. If, for example, you need to set a crossover point for a tweeter, then depending on it’s usable frequency range, you will select a crossover point and the slope accordingly. If you select a shallow slope (1st order), the tweeter will reach the lower octaves as well, and depending on it’s playable frequency range, it could damage the tweeter. On the other hand, bear in mind that going for a higher order crossover, will make the design more complex. In fact, the order of the x-over will determine the amount of capacitors / inductors the design will have. In general, the more components the crossover has, the worse it gets for the audio signal. Go for a lower order crossover whenever possible.
Passive crossover schematic for multi-way networks
Soon, we will get into detail about the types and the passive crossover schematic of each one in particular. When we will discuss the crossover types, we will be talking about the 2-way setup as it is the most common. However, 3-way setups are not that uncommon. 4 or more way systems are usually pretty scarce. Let’s talk about the 3 way crossover, so you can understand how multi-way works, and then we will go into details about the crossover types, focusing on 2 way systems.
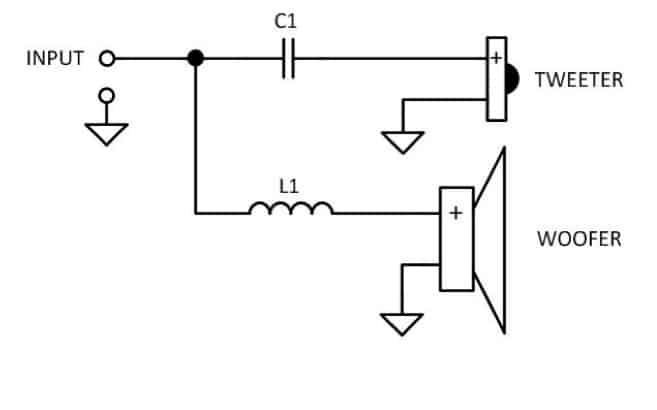
This is the simplest crossover design out there, for a 2 way system. When you put a capacitor in series with a speaker, the lower frequencies are filtered. When you put an inductor in series with a speaker, the higher frequencies are filtered. Depending and the values of the capacitors and inductors (measured in farads and henries), various crossover points are chosen. Now to make this into a 3 way setup, the high frequencies are split once more into high and low bands. The “low” for the second split will correspond for the midrange driver.
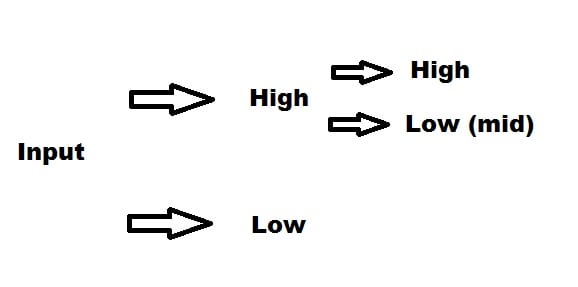
Now you can split the high frequencies, once again, into high and low to get a 4 way crossover, and so on, depending on how many drivers your system has.
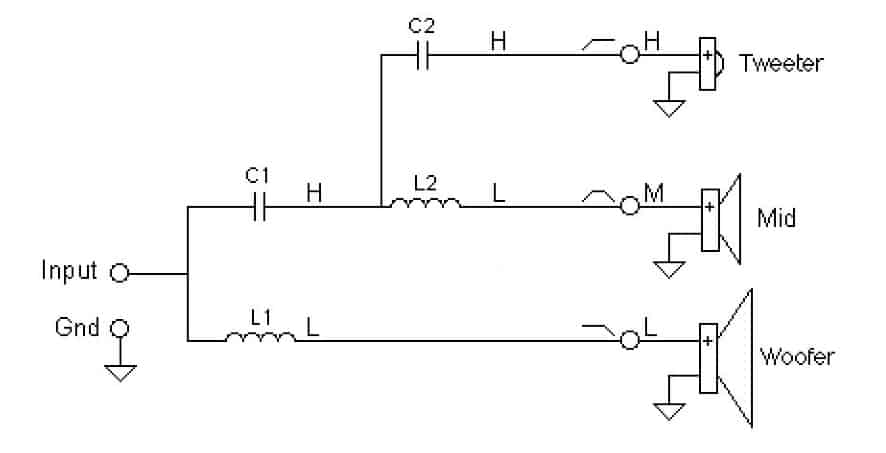
To get a more realistic idea, you can see above, how the most simple 3-way crossover will look like.
1st order Butteworth
This is the exact same crossover as above. It is the simplest crossover design and very popular in hi-fi audio systems, with low power capabilities. Furthermore, the frequency slopes of the drivers used in the system will sum nicely, to give an accurate frequency response and delay response. Can be used with high chance of success in 3-way or multi-way systems. However, if the audio system has a high power demand, this may not be an optimal choice. Because of the shallow slope of 6 dB, the tweeter might be damaged in stressful situations, because the x-over does not provide appropriate protection. Up next, is the passive crossover schematic for a basic 1st order x-over :
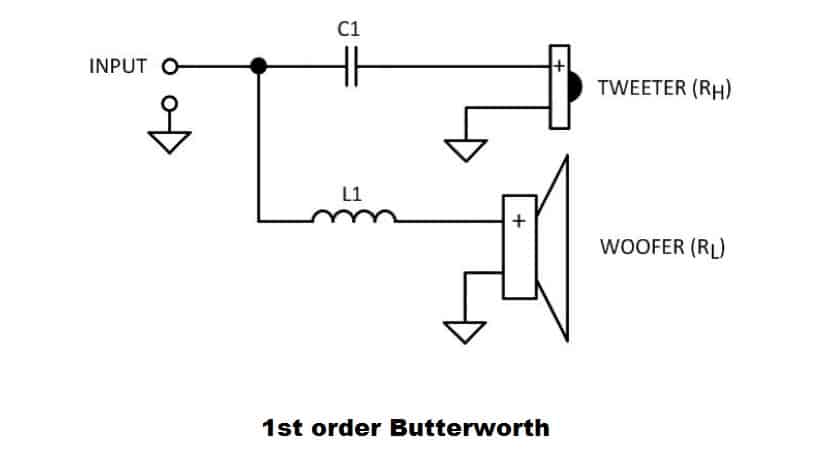
To find out the values of the capacitor and inductor, you will need to know the impedance of the speakers and the desired frequency where you want to set the crossover point.
Explanation of terms :
- C1 – Capacitor 1, measured in Farads.
- L1 – Inductor 1, measured in Henries.
- RH – The rated impedance of the high frequency speaker (tweeter), measured in ohms.
- RL – The rated impedance of the low frequency speaker (woofer), measured in ohms.
- fC – crossover frequency point.
To calculate the values of the capacitor and inductor use these formulas :
- C1 = 1 / (2π * fC * RH) .
- L1 = RL / (2π * fC) .
2nd order Butterworth
The 2nd order crossover design has many types, because it has an adjustable Q factor. The design is the same for whatever type it is, only the values of the components will vary, which will determine the exact type of the crossover. When we are talking about the 2nd order Butterworth design, few problems appear. For the Butterworth alignment, the individual filters are 3 dB down at the crossover frequency. This means when you sum them up, you will get a dip of 3 dB at the crossover point. To counter this, you can reverse the polarity and the graph will shift upward, and you will get a peak of 3 dB at the crossover point. Generally this type of crossover is not recommended. Here is the passive crossover schematic for the 2nd order design :
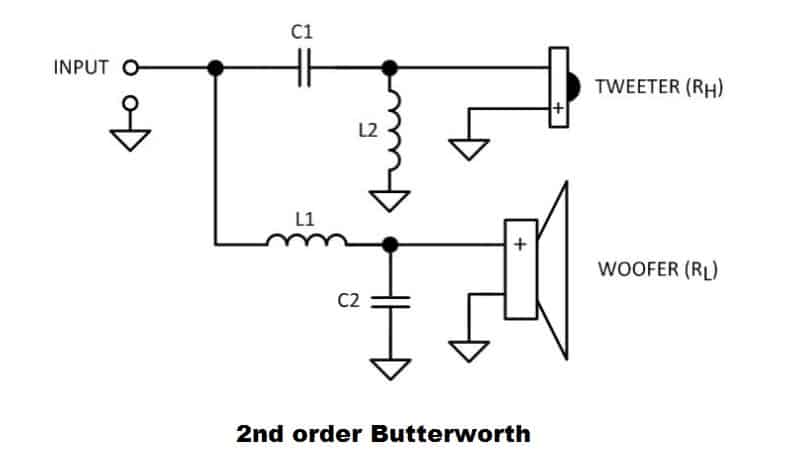
As you can see, because we got higher in the order ranking, the amount of components needed has increased by 2. To calculate the values of the components use the following formulas :
- C1 = √2 / (4π * fC * RH) .
- C2 = √2 / (4π * fC * RL) .
- L1 = (√2 * RL) / (2π * fC) .
- L2 = (√2 * RH) / (2π * fC) .
2nd order Linkwitz-Riley
Linkwitz-Riley crossover can be found in all even orders. This means there are 2nd order, 4th order, 6th order and so on, variants. What makes LR crossovers so special, is that the two frequency curves will sum up to a flat response. If we are comparing this design to Butterworth, the following differences appear : The individual Butterworth filters are 3 dB down at crossover point and LR is 6 dB down.
How to design loudspeakers - video courses


Butterworth has 90 degree phase difference which means the 2 curves will add up for 3 dB boost. However, Linkwitz-Riley has no phase difference and the 2 curves add up for a 6 dB boost. Linkwitz-Riley is also called Butterworth squared, because it is equal to two Butterworth of lower order in series. For example two 1st order Butterworth in series is equal to 2nd order Linkwitz-Riley, or two 2nd order Butterworth in series is equal to a 4th order Linkwitz-Riley, and so on.
Regarding the 2nd order Linkwitz-Riley, the passive crossover schematic is the same as 2nd order Butterworth, but the values of the components are different. To calculate the values of the components, use these formulas :
- C1 = 1 / (4π * fC * RH) .
- C2 = 1 / (4π * fC * RL) .
- L1 = RL / (π * fC) .
- L2 = RH / (π * fC) .
3rd order Butterworth
This is a good solution for a 2-way system with a 18 dB / octave roll-off slope. When the high and low curves add up, they will sum for a flat amplitude, regardless of the relative polarity of the drivers. However, because the 3rd order Butterworth cannot deliver a flat delay response, they will produce frequency response problems for a multi-way system. If you want to use this filter for a 3 way setup, make sure you space out the two crossover points as much as possible.
For this design, it is necessary to inverse the polarity of the tweeter, to get the best summed phase response. Here is the passive crossover schematic for this design (note the tweeter polarity is reversed) :
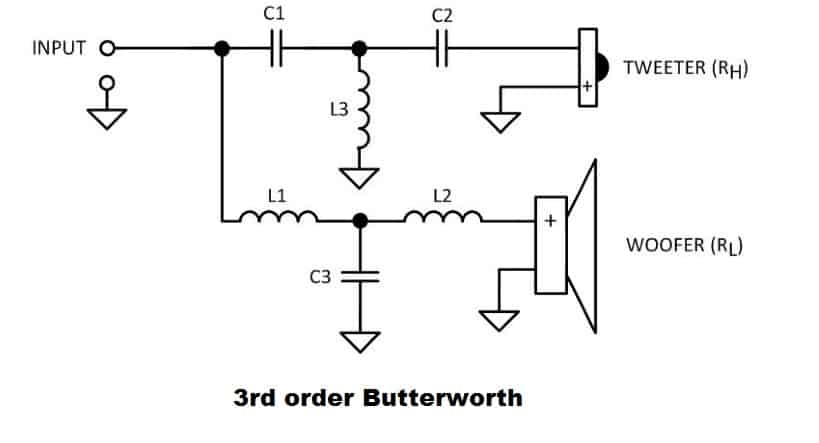
To calculate the values of the components, use these formulas :
- C1 = 1 / (3π * fC * RH) .
- C2 = 1 / (π * fC * RH) .
- C3 = 2 / (3π * fC * RL) .
- L1 = 3RL / (4π * fC) .
- L2 = RL / (4π * fC) .
- L3 = 3RH / (8π * fC) .
4th order Linkwitz-Riley
The 4th order Linkwitz-Riley crossover is a very complex design, as it incorporates a large amount of components, and it is on the expensive side as well. It gives a flat summed frequency response, and because of the steep 24 dB / octave slope, it gives an excellent protection for the tweeters. This type does not exhibit a flat phase response, so in a multi-way setup it can cause some problems. This type of crossover is recommended over the 3rd and 4th order Butterworth due to its superior summed frequency response and desirable lobbing characteristics.
Here is the passive crossover schematic for the LR4 and how to calculate the values of the components :
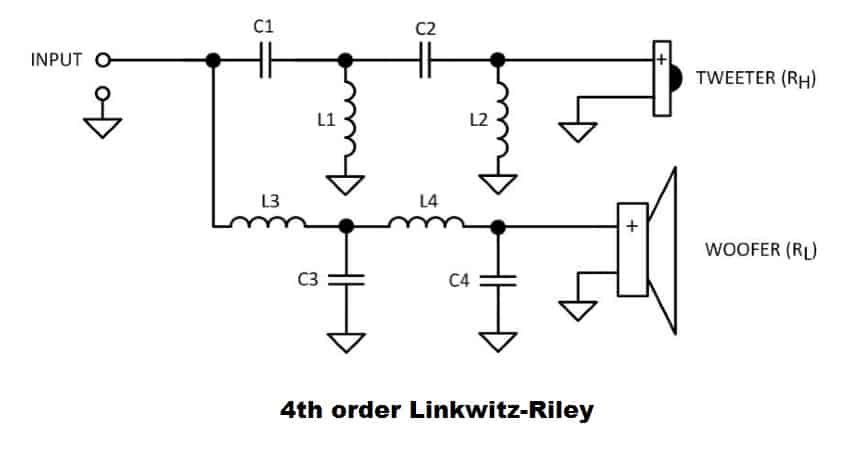
- C1 = 3√2 / (16π * fC * RH) .
- C2 = 3√2 / (8π * fC * RH) .
- C3 = 9√2 / (16π * fC * RL) .
- C4 = √2 / (8π * fC * RL) .
- L1 = (2√2 * RH) / (9π * fC) .
- L2 = (√2 * RH) / (π * fC) .
- L3 = (2√2 * RL) / (3π * fC) .
- L4 = (√2 * RL) / (3π * fC) .
Conclusion
The only crossover types which provide flat sum for both frequency response and phase response are the 1st order Butterworth or other 1st order variants. They are also the least complex and the cheapest. On the other hand, they don’t provide adequate protection for the tweeters in a high power audio system. The 2nd and 4th order Linkwitz-Riley are great for almost all 2-way systems. For a 3-way setup, at least one of the crossovers should be a constant voltage type, in order to achieve the most accurate summed frequency response. In a passive crossover network, it is not uncommon to stumble upon other circuits, besides the filter parts, like : impedance compensation networks, attenuators to match the levels of the drivers, tweeter protection circuit etc.
References
- Introduction to Loudspeaker Design: Second Edition by John L. Murphy (True Audio, 2014). (Amazon affiliate link)
- Image source : AI generated
You May also Like
Learn loudspeaker design from scratch

24 comments
fc is just for a 2-way crossover isn’t it ? So what formulas do I have to apply to find caracteristics of a 3-way crossover ? Indeed there are 2 points of frequency split so we don’t need only fc.
You can consider the 3-way crossover as two separate 2-way filters. 2-way between the tweeter and mid and another 2-way between the mid and the woofer. For the midrange circuit place all the components from both calculated 2-way filters.
Awesome post! Thank you sir 🙂
Such a well written article. An amateur like me learned a lot. Thanks.
Excuse me but, are the formulas correct? ‘Cause I need to have true values. I saw some other formulas in other sites and I suspected which one of them are true? (or truer?)
Yes, the formulas are correct. But bear in mind that these formulas treat the speaker as a resistor (with fixed impedance). And we know that the speaker impedance varies with frequency. Modeling software does the trick, but you can use these formulas to get a starting point.
Hello, me again.
Thank you for replying my comment.
I would be apreassiated if you could reply me 8th and 10th order linkwitz riley lowpass and high pass capicitors and inductors formulas, I need these for some other special uses and I know their sound reproduction are not very different from 4th order linkwitz riley crossovers.I have been searching
alot recently, but I found nothing but 4th and 6th order butterworth and linkwitz riley.
I don’t know any audio literature that covers anything higher than 4th order. I mean what’s the point of anything higher than that? Too many components for not much benefit. A 24 dB/oct slope should be more than sufficient for almost any project.
If you really want to make such filters you can use software like XSim and add however many components as you like and see the real time response of the system.
Hi !
If i put a notch filter ( series RLC) in paralel with the tweeter, it changes an impedance seen by L-Pad in first place (and therefore an impedance seen by HP filter too…). What is the formula to calculate a total impedance seen by L-Pad now?
Is it just 1/Znew = (1/Znotch) + (1/Ztweeter) or what?
Tnx!
You have to understand the these formulas consider the speaker as a resistor (with fixed impedance). They are basically a starting point when building a crossover but shouldn’t be taken as very accurate. The impedance of the speaker varies with frequency. If you use the notch filter to tame the impedance peak at the resonant frequency then the impedance graph will be more flat and the formulas would be more precise. If you want to see how the impedance varies while adding more components to the circuit (the series RLC you mention), best way is to use software. You can try XSim for that matter.
Please, show topology for 3 way 2nd order linkwitz riley alignment
Well a 3-way is actually a 2 way between the woofer and midrange and another 2 way between tweeter and midrange.
Is a 3 way 2nd order linkwitz riley passive crossover has no phase difference on each filter ?
Regardless of you crossover, you will have some phase shift. 2nd order will have 180 degrees phase shift. So, if you reverse the polarity of the speaker you will have no phase shift. But bear in mind that in reality you will never get this perfect results and you will encounter some phase shift which you need to be aware of / measure it.
Please tell me how to encounter remaining phase shift as I am non technical person and don’t have measurement software.
Well you can’t really do anything correctly without measurement equipment and crossover software.
sir how to design on crossover schematics design for bi-wiring and bi-amping system .
For bi-amping, you design the crossover as normal. But you hook up the tweeter section to an amp channel and the bass section to another channel on your amp. Bi-wiring is just adding another set of wire from the amp to the speaker, so basically instead if wiring the speakers in parallel in the crossover, you wire them in parallel on the amp side. I really see no point in doing this.
Very informative article,I like how you simply the process on every project you examine. My question is this when designing a passive 2way crossover which impedance or resistance value would you use to calculate the various components. I have a Dats V2 and as such can sweep the driver’s in their environment to get a exact impedance curve. I was wondering if i shouldn’t use the actual impedance value at the crossover point i wish to use as the value to calculate the passive components.
These are formulas which consider the speaker as a resistor, with fixed resistance and therefore won’t work in real life. These can be used as a starting point for your crossover design. However, besides DATS, you also need a measurement microphone and after you measure the frequency response and impedance response of each driver, inside the enclosure you plan to use them, only then you can start designing crossovers using appropriate software like XSim.
I thought I recognised the diagrams. Straight from Murphy’s book! murphy’s Law… I followed his design for a 1st order Butterworth with compensating network and notch filter. I used Vituix to adjust the values. It was quite an expensive filter in the end for a 2 way design (9 components) but I got quite a nice response curve with just just 2 small 2db ripples after 2.9k Hz before tapering off around 18k Hz. I would not probably design one like that again as I can probably achieve the same with less components and different driver selection. Still I am reasonable happy. It has been designed for a TV stand transmission line soundbar.
Hi,
Great info. I’m enjoying your courses on udemy too.
May I ask, what do you mean by constant voltage type filter for a 3-way crossover?
Cheers,
Dean.
Hello
Since we use software to aid us in crossover design (like XSim), these guidelines and formulas are pretty much obsolete.
However if you really want to read more about this you can check out Richard Small’s papaer: https://www.labjc.com/wp-content/uploads/2017/11/Small-Constant-Voltage-Xover.pdf
Would you please upload the formula for the 6th Butterworth?